| Coast Tracker |
One of the goals of the mission is to build a complete map of the planets islands. As the visibility conditions are not suitable for aerial observation, ESA decided to build a set of rover robots specifically intended to make coast tracking by land. The idea is to leave one of these robots at one point in the coast of an island and let him autonomously discover the map of the entire coast, then come back as the robot returns to the same place and take it to the next island.
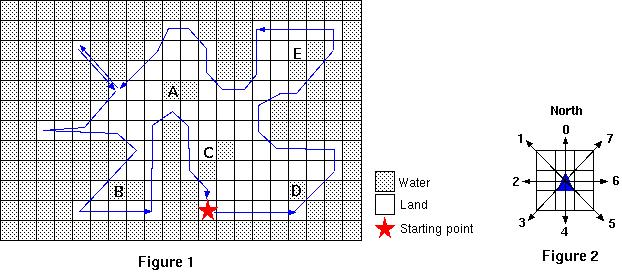
You are working with the team that is programming the navigation software for these robots, and some decisions were already taken: the surface will be discretised into squared, equal-sized areas; for simplification purposes, each area will be considered as being entirely covered by land or water. Also, the robot will always start its job in a square of the coast, with the sea at its right; therefore, the coast will be tracked in a counter clockwise direction (see Figure 1).
The robot will have a limited perception system that will be able to determine the kind of surface of the 8 areas neighbouring the one where the robot stands. Its movement capabilities will also be limited: the robot will only have the possibility of (i) rotating to one of 8 fixed directions (coded as integers from 0 to 7, 0 being North - see Figure 2) and (ii) moving to the neighbour position in front of him. Each time the robot moves to a new position, the perception system gets a new percept. There are no obstacles to worry about: God conveniently arranged the islands to have smooth, sand coasts. There are lakes (e.g., A, B, C, D and E in Figure 1), but the robot must not waste time with them: the goal is to track the seacoast only.
Given the current position and direction of the robot, and a
percept of the surrounding world, decide the direction of the next
move. Note that you are not being asked to program the whole
coasttracking software; you are just programming a part of it.
The direction must be computed in such a way that an iterative
call of the program, with percepts from an environment as the one
described, would allow the robot to track the coast.
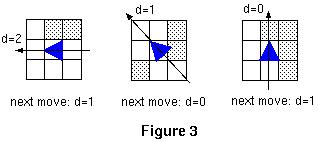
Your program must be able to process several scenarios. Each scenario comprises the robots current position and direction, and a percept. Figure 3 illustrates three hypothetical scenarios and the intended result: the direction of the next move.
Successive values in a line are separated by one or more blanks. The integer -1 follows the data of the last scenario.
22 25 2 22 26 0 21 26 1 21 25 1 21 24 1 22 24 1 23 24 1 23 25 1 23 26 0 21 26 1 21 27 1 20 27 1 20 26 1 20 25 0 21 25 1 22 25 1 22 26 0 22 27 0 21 27 0 21 28 0 20 28 1 20 27 1 20 26 1 21 26 1 22 26 0 22 27 0 22 28 0 -1
1 0 1